The M21 is a high-precision combined navigation module comprising 54 pins and packaged in a LGA. The module incorporates a high-precision measurement engine, navigation engine and functional safety processor. The module is capable of supporting anti-jamming of 65 dBc narrowband, high-performance RTK and deeply-coupled combined navigation solutions, thereby enabling it to function effectively in harsh environments such as those characterised by satellite signal interference and multipath. It is able to provide continuous, real-time and reliable high-precision position and attitude data, which makes it suitable for use in automated driving, drones, precision agriculture, surveying, mapping and other applications.
Technological Advantage
|
• Deeply-coupled Combined Navigation Algorithm The device is equipped with a MEMS IMU, which enables the calculation of DR and facilitates the continuous output of high-precision position and velocity data, even in scenarios where the target is briefly occluded. It is compatible with the deeply coupled combined navigation algorithm based on the Bynav Alice SoC, which enhances the quality of GNSS observations. In environments such as urban canyons, its positioning accuracy is 2 to 5 times superior to that of loosely coupled algorithms.
|
|||||
| • High-performance Multiple Interference Suppression |
|
||||
|
SAIF (Smart Advanced Interference Defense) is a high-performance multiple interference suppression technology with high AD quantization bits. It is built in and capable of handling different interferences, including single-frequency, multitone, sweeping, pulse, and narrowband, with an interference-signal ratio of 65 dBc. SAIF can address common interference signals in complex electromagnetic environments, thereby greatly improving the availability and integrity of high-precision positioning in vehicle scenarios. |
|
||||
|
• L-Band*, CLAS*, B2b (PPP)* and E6 (HAS)*
The device is capable of receiving L-Band* SBAS signals and provides high-precision positioning in environments where conventional differential services or mobile communication services are unavailable. It supports BeiDou-3 B2b PPP* and E6 HAS* solutions, utilising the four-frequency signals from BeiDou and Galileo to significantly improve PPP convergence speed and enhance the availability of high-precision positioning.
|
|
||||
|
Feature |
|
||||
|
» Independent Intellectual Property Rights |
|
||||
|
» Full Constellations and Full Frequency(1507 Channels) |
|
||||
|
» High-performance Anti-jamming* |
|
||||
|
» Support Ethernet Port, Embedded SDK Differential Account, SupportgPTP Time Synchronization |
|
||||
|
» AP Partition Design Ensures Stable and Reliable OTA Upgrades |
|
||||
|
» Support System Self-check and Fault Diagnosis*
|
|
||||
|
Application |
|
 |
 |
|
Intelligent Driving |
Agriculture |
 |
 |
|
Drone |
Intelligent Robot |
|
Performance
|
|
|
Constellation:
|
GPS, BDS, GLO, GAL, QZSS, NavIC
|
| Number of Channel: |
1507
|
|
Tracking
|
|
|
L-Band*
|
3 channels, 1525~1559 MHz
|
|
BDS-2
|
B1I, B2I, B3I
|
|
BDS-3
|
B1I, B1C*, B2a, B2b*(PPP)
|
|
GPS
|
L1 C/A, L1C*, L2, L5
|
|
GLO
|
G1, G2
|
|
GAL
|
E1, E5a, E5b, E6*
|
|
QZSS
|
L1 C/A, L1C, L2, L5, L6*
|
|
NavIC
|
L5
|
|
SBAS*
|
L1 C/A
|
|
Anti-jamming*
|
|
|
Single-frequency, Multitone, Sweeping, Pulse,Narrowband;
|
|
|
Interference-Signal Ratio: 65 dBc
|
|
|
Interface
|
|
|
UART
|
×4
|
|
SPI*
|
×1
|
|
CAN FD
|
×2 |
|
ANT_DETECT
|
×1 |
|
PPS
|
×1 |
|
RMII
|
×1 |
|
Horizontal Positioning Accuracy (RMS)1,2
|
|
| Single Point |
1.5 m
|
| RTK |
1.0 cm + 1 ppm
|
| Vertical Positioning Accuracy (RMS)1,2 |
|
| Single Point |
2.5 m
|
| RTK |
1.5 cm + 1 ppm
|
| Max. Output Rate |
|
|
GNSS Observation9
|
5 Hz
|
|
GNSS Positioning Result9
|
5 Hz
|
|
INS Positioning Result
|
100 Hz |
|
IMU Raw Data
|
100 Hz |
| DR Accuracy (2σ)1,3 |
0.8 %
|
|
Time To First Fix
|
|
|
Cold Start 3,5
|
≤ 30 s
|
|
Hot Start 4,5
|
≤ 5 s
|
|
RTK Initialization1
|
≤ 5 s
|
|
Re-acquisition Time
|
≤ 1 s
|
|
Timing Accuracy (RMS)7
|
≤ 20 ns
|
|
Velocity Accuracy6
|
0.03 m/s
|
| RTK Solution Delay |
≤ 50 ms
|
|
Gyroscope
|
|
|
Measure Range (° /s)
|
± 300
|
|
Angle Random Walk ( ° /h)
|
0.5
|
|
Bias instability (° /h)
|
5
|
|
Bias (° /s)
|
0.3 |
|
Scale Error
|
4‰
|
| Cross Coupling Error |
1.7‰ (0.1° )
|
| Accelerometer |
|
| Measure Range (g) |
± 16
|
| Velocity random walk (m/s/ √ h) | 0.3 |
| Bias instability (μg) | 50 |
| Bias (mg) | 5 |
| Scale Error |
2‰
|
| Cross Coupling Error |
0.9‰ (0.05° )
|
|
System Functional Safety*
|
ASIL B
|
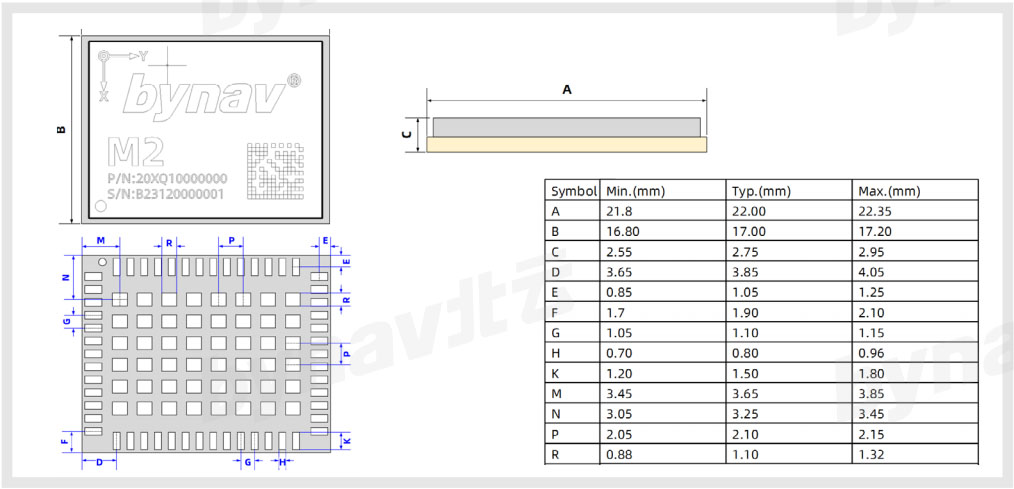
Mechanical and Electrical
Size
17.0 × 22.0 × 2.75 mm
Package
54 pin LGA
Weight
2 g
Power Consumption8
500 mW
Power Supply Range
3.0~3.6 V
Environment and Certification
Operation Temperature10
-40 ℃ ~ +85 ℃
Storage Temperature11
-55 ℃ ~ +150 ℃
Humidity
95% Non-condensing
Vibration
JESD22-B103
Shock
JESD22-B110
IATF 16949*
ISO 26262 ASIL B*
AEC-Q104*
Note:
1. Typical value. Performance will be affected by GNSS status, satellite position, baseline length, multipath and other interferences;
2. Using a 1 km baseline and a receiver with good antenna performance, without considering possible errors due to antenna phase centre offset.
3. Typical value. There is no almanac, ephemeris and approximate position or time. or time.
5. -130dBm and more than 12 satellites are available.
6. Open sky without any obstruction, 99%@ static;
7. Optional. RF and antenna bias are not included.
8. Typical value. Antenna and peripheral power not included;
9. 20Hz is supported in special firmware;
10. There is an optional temperature range of -40℃ ~105℃;
11. There is an optional temperature range of -40℃ ~150℃;
* Optional, supported in dedicated firmware.
Mechanical Specification